")
")
 |
Principe KISS (Keep It Simply Stupid) pour la réalisation et paramétrage de ce manipulateur Winkeyer à l'aide d'un Arduino Nano et le logiciel Keyer de K3NG. |
Description
Ce manipulateur étant destiné à être utilisé principalement en liaison avec un logiciel contest, j'ai décidé de le réaliser avec le minimum de fonctions nécessaires :
- pas de réglage de vitesse par potentiomètre
- pas de mémoires
- pas de monitor
- pas d'afficheur
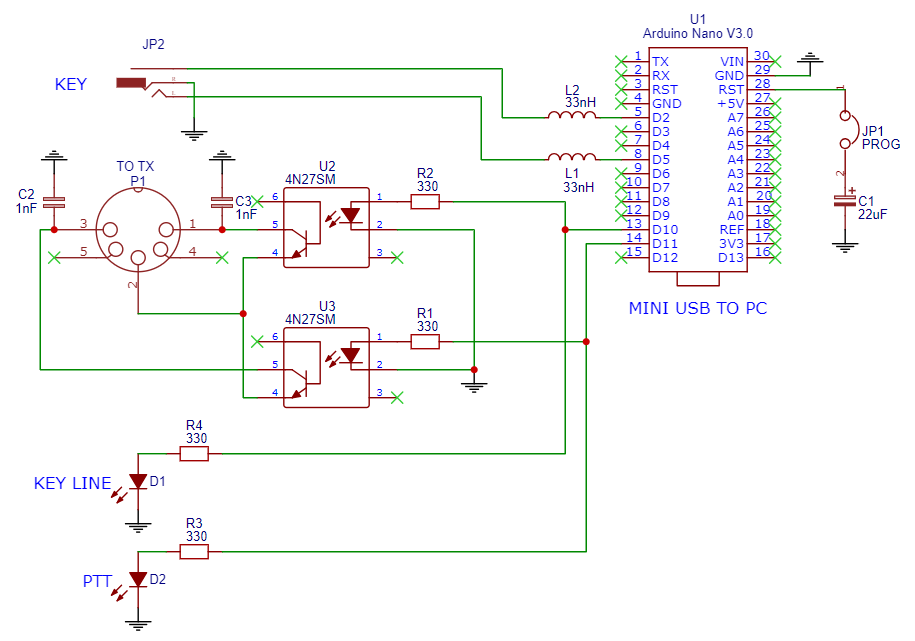
Schéma
Programmation de l'Arduino
Le logiciel KEYER de K3NG est téléchargé sur le site Gihub de l'auteur et chargé avec le logiciel IDE d'Arduino.
On modifie les fichiers de configuration suivants en ne laissant décommentés que les lignes suivantes.
Lors de la programmation, il faut que le cavalier PROG soit absent afin de permettre un accès au port USB.
On compile puis programme l'Arduino.
Fichier keyer_hardware.h
#define HARDWARE_NANOKEYER_REV_D
Fichier keyer_pin_settings_nanokeyer_rev_d.h
#define paddle_left 2
#define paddle_right 5
#define tx_key_line_1 10
#define ptt_tx_1 11
Fichier keyer_features_and_options_nanokeyrer_rev_d.h
#define FEATURE_WINKEY_EMULATION
#define OPTION_INCLUDE_PTT_TAIL_FOR_MANUAL_SENDING
#define OPTION_EXCLUDE_PTT_HANG_TIME_FOR_MANUAL_SENDING
#define OPTION_WINKEY_STRICT_HOST_OPEN
#define OPTION_WINKEY_2_SUPPORT
#define OPTION_WINKEY_2_HOST_CLOSE_NO_SERIAL_PORT_RESET
#define OPTION_WINKEY_IGNORE_LOWERCASE
#define OPTION_DIT_PADDLE_NO_SEND_ON_MEM_RPT
#define OPTION_DO_NOT_SEND_UNKNOWN_CHAR_QUESTION
#define OPTION_EXCLUDE_EXTENDED_CLI_COMMANDS
#define OPTION_WINKEY_PROSIGN_COMPATIBILITY
Fichier keyer_settings_nanokeyer_rev_d.h
A convenance pour tout ce qui est du paramétrage fin du manipulateur
On pourra vérifier le bon fonctionnement de l'ensemble à l'aide du logiciel WKdemo (pour version 1 et 2) de K1EL, avant utilisation de votre logiciel de concours ou trafic.
Les paramètres de communication avec le Winkeyer sont 1200 bauds,8,N,2 DTR et RTS Handshake.
Réalisation
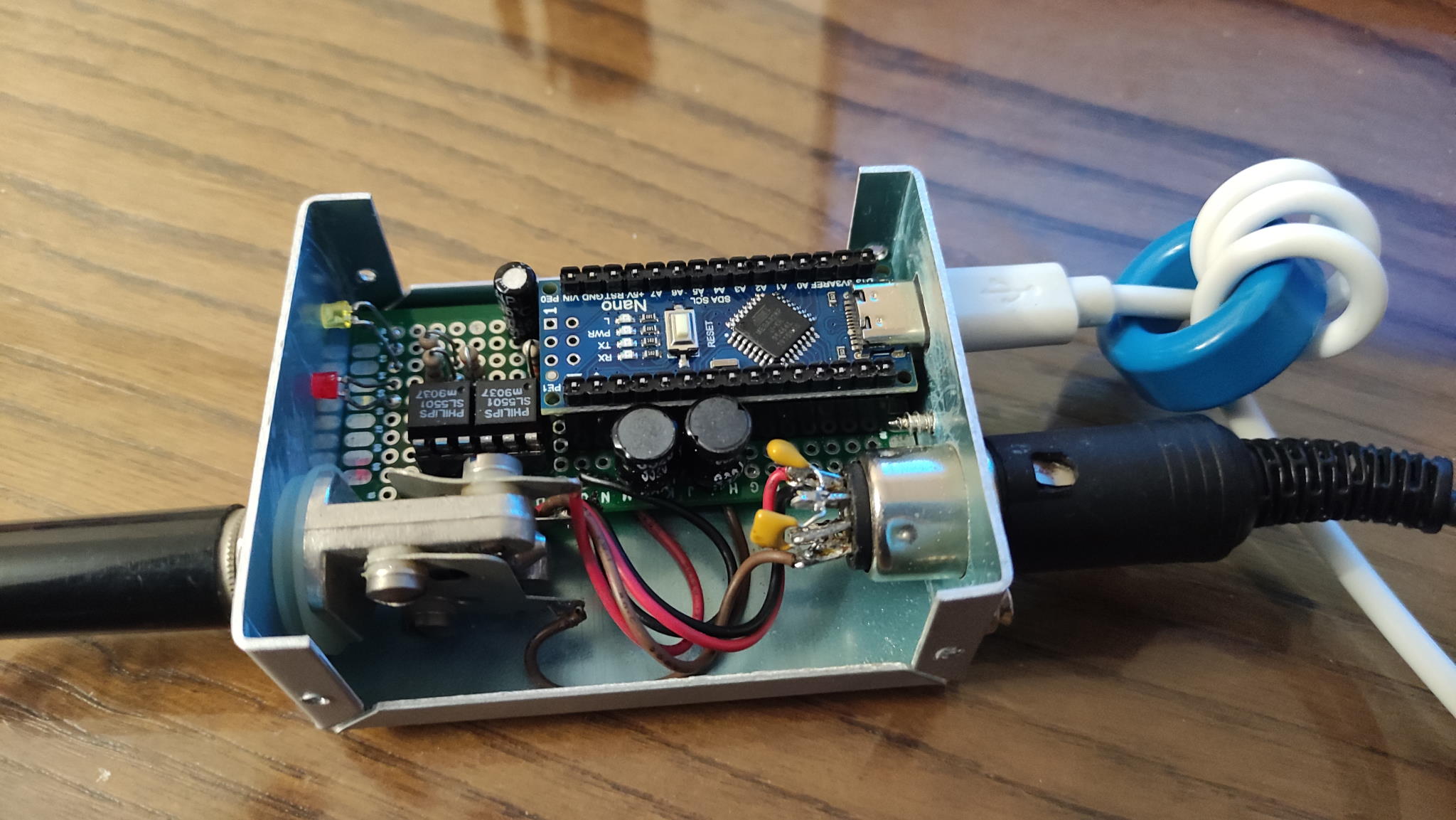
L'Arduino est installé sur un support qui est soudé sur la plaquette à trous, tous comme les autres composants.
Les sorties PTT et MANIP se font sur un connecteur DIN 5 broches et le manipulateur est prévue sur une fiche JACK stéréo de diamètre 6,3 mm. Par sécurité, j'ai rajouté quelques capacités et selfs de filtrage HF.
Un tore de ferrite sur lequel le câble USB est bobiné permet de s'affranchir des signaux HF qui pourraient perturber le bon fonctionnement.
2 LEDs permettent de visualiser l'état des sorties vers le transceiver.
Le montage est réalisé sur une plaquette à trous et est installé dans un boîtier TEKO modèle A2 58 x 72 x 28 mm
Le tout donne un montage très contact et alimenté par le port USB de l'ordinateur.
Utilisation
En utilisation, ce cavalier PROG doit être en place. Il empêche une RAZ de l'Arduino en cours d'utilisation.
La communication avec l'ordinateur hôte se fait par défaut à : 1200 bauds,8,N,2 DTR et RTS Handshake.
Tous les réglages (vitesse, rapport point/trait, délais, etc...) sont effectués au nouveau des logiciels.
Liens
Le site de l'auteur K3NG
Site Github avec la dernière version du logiciel
Site de K1EL - logiciel WKdemo et documentations