")
")
- Détails
- Clics : 1259
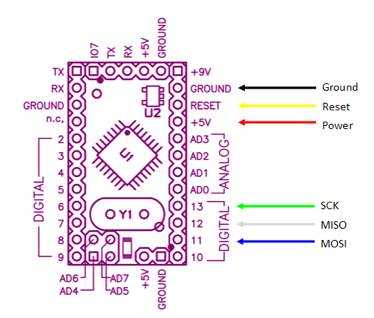 |
Petit tuto pour programmer un Arduino Pro-mini en ICSP avec un programmateur USBASP 2.0 Dans certains cas, il peut être nécessaire de programmer un Arduino via le port ICSP. Par exemple, si le microcontrôleur a été remplacé par un neuf, si par mégarde le bootloader a été corrompu ou effacé, si le programme injecté est corrompu et qu'il n'y a plus d'accès via le port USB ou le connecteur FTDI, si le logiciel est distribué au format HEX, si on n'a plus accès au microcontrôleur via le port USB, etc... |
- Détails
- Clics : 9350
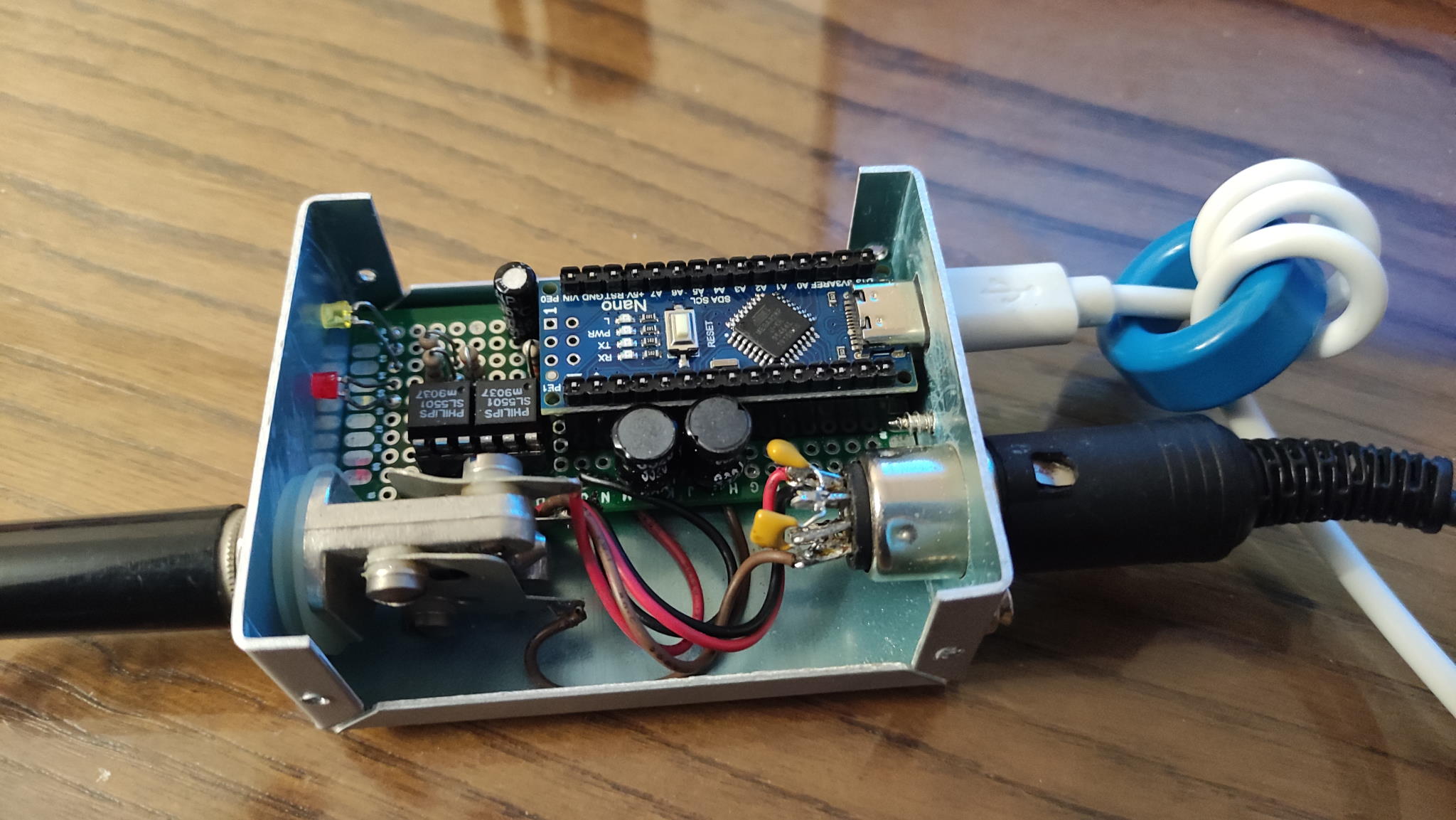 |
Principe KISS (Keep It Simply Stupid) pour la réalisation et paramétrage de ce manipulateur Winkeyer à l'aide d'un Arduino Nano et le logiciel Keyer de K3NG. |
- Détails
- Clics : 17795
This page is just a reminder for me, so i can find the commands i need from everywhere in the world... ;-) But it can be helpful ...
I've built a K3NG keyer with a small Arduino Pro mini board. I needed minimal functions :
- 3 memories
- a small speaker for the monitor.
- no speed pot.
- no USB interface.
- sleep mode after 1 minute.
- all settings are done in command mode with the paddles.
To be used in the field, the keyer is powered with a 3.7V battery. When in operating mode, the keyer consumes about 4mA, in sleep mode after 1 minutes : 0.1 uA ! No power switch is needed.
The author's Web page : https://blog.radioartisan.com/arduino-cw-keyer/
The software can be downloaded here : https://github.com/k3ng/k3ng_cw_keyer
The K3NG keyer Wiki is available here : https://github.com/k3ng/k3ng_cw_keyer/wiki/
SETTINGS
File Keyer_features_and_options (only this lines were uncommented)
#define FEATURE_COMMAND_BUTTONS
#define FEATURE_MEMORIES
#define FEATURE_SLEEP
#define OPTION_PROG_MEM_TRIM_TRAILING_SPACES
#define OPTION_DIT_PADDLE_NO_SEND_ON_MEM_RPT
#define FEATURE_COMMAND_MODE_ENHANCED_CMD_ACKNOWLEDGEMENT
File Keyer_settings (Changed only this line)
#define go_to_sleep_inactivity_time 1
#define analog_buttons_number_of_buttons 4
COMMAND MODE
Enter in command mode by pressing the command button
Exit command mode with X command or press the command button
MEMORIES
Px - program memory x (1 to 12), or press memory button after command button
Yxxxx - change memory repeat delay to xxxx ms
REPEAT press the memory button and keep it pressed then touch a paddle.
ERASE simply change memory but leave empty
SPEED
E - Announce speed
W - change speed with LEFT (plus) and RIGHT (minus) paddles.
M - change COMMAND mode speed
MONITOR
F - Change monitor frequency, use paddles for higher or lower frequency
O - toggle Monitor ( cycles through BOOP OFF, short BEEP ON, long BEEP ON only in paddle mode, not memories )
KEYER MODE
A - Switch to Iambic A mode
B - Switch to Iambic B mode
C - Switch to Single Paddle Mode
D - Switch to Ultimatic mode
G - Switch to Bug mode
T - Tune mode press RIGHT paddle for permanent Tune, LEFT paddle for intermittent Tune
KEYING SETTINGS
H - Set weighting and dah to dit ratio to defaults
I - TX enable / disable
J - Dah to dit ratio adjust
K - Toggle Dit and Dah Buffers on and off (Ultimatic Mode)
L - Adjust weighting
N - Toggle paddle reverse
Z - Autospace On/Off
STATUS
? sends status
1) Speed in WPM
2) Keyer Mode (A = Iambic A, B = Iambic B, G = Bug, S = Single Paddle, U = Ultimatic)
3) Weighting
4) Dah to Dit Ratio
- Détails
- Clics : 15558
Some notes on how to use a SIM800 coreboard with an Arduino.
I bought the following cheap SIM800L board and have had some problems to make it work.
- Détails
- Clics : 24284
Description d'une platine "universelle" aussi appelée "shield" permettant l'utilisation d'un Arduino UNO avec le logiciel rotor de K3NG. Seule la fonction AZIMUT est supportée.
Cette platine a été conçue de manière à permettre l'utilisation du logiciel soit avec un afficheur LCD ou une carte réseau pour fonctionnement à distance via IP, et d'un rotor doté d'une résistance variable. (HAM II et HAM IV en ce qui me concerne)
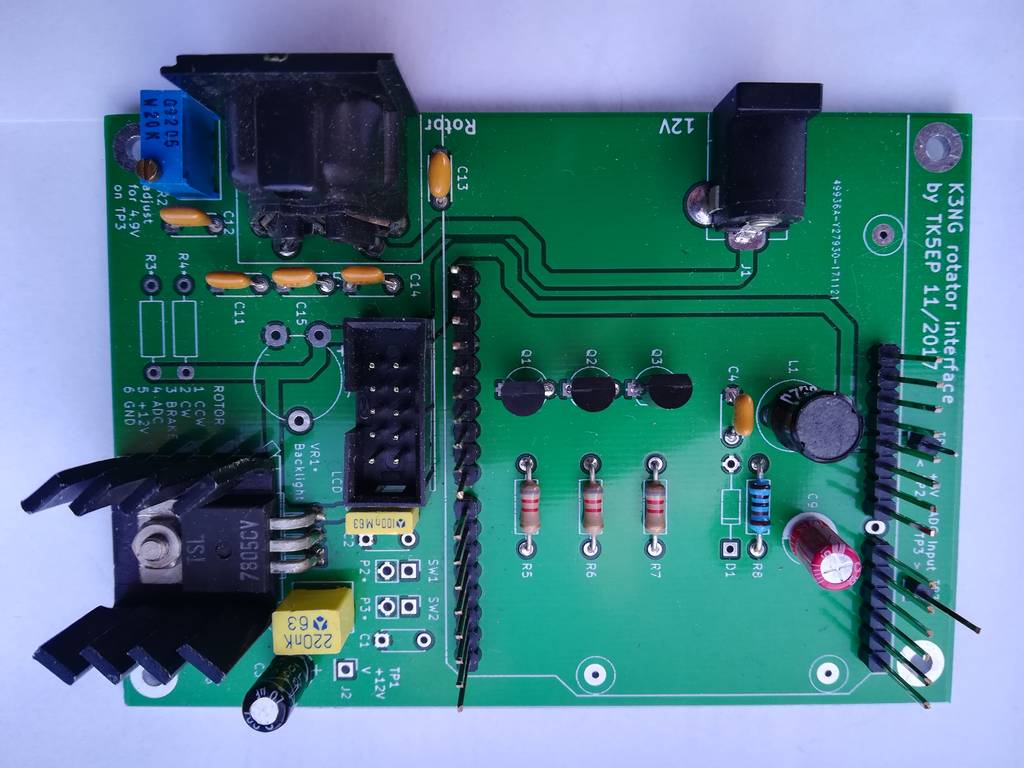 La platine comporte :
La platine comporte :
- un régulateur 5V/1A
- un connecteur pour enfichage d'un Arduino UNO seul ou avec un shield réseau
- un connecteur HE10 mâle pour câble en nappe pour le raccordement d'un afficheur LCD
- un connecteur DIN 5 broches femelle pour raccordement d'un rotor
- 2 connecteurs pour boutons-poussoirs "Sens horaire" et "Sens anti-horaire"
- une résistance ajustable multi-tours VR2 pour la calibration de l'azimuth
- une résistance ajustable VR1 de réglage contraste de l'afficheur LCD
- 3 transistors pour les commandes CW, CCW, et BRAKE du rotor (sorties à collecteurs ouverts)
Je dispose encore de quelques circuits imprimés que je peux céder. Me contacter...
- Détails
- Clics : 23643
Dans mon Projet "Apaguard", j'ai besoin de mesurer de façon permanente le poids d'une ruche.
Pour ce faire, j'ai choisi :
- une sonde de poids de la marque ZEMIC, référence L6E, avec une charge maximale de 150 kg et de classe C3. ( lien vers documentation )
- une platine avec un DAC 24 bit référence HX711. ( lien vers documentation )
Voici mon expérience avec cette configuration. (commencée le 12/07/2015)
- Détails
- Clics : 37516
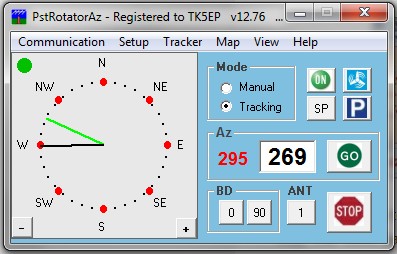 |
Lors de la construction de ma station télécommandée, j'ai recherché une solution pour télécommander mon rotor à distance, donc via Ethernet. Il existe plusieurs possibilités, mais j'ai finalement adopté celle proposée par K3NG et son interface développée sur Arduino. J'avais déjà construit une interface de ce type pour une commande via USB et mon rotor HAM IV. |
- Détails
- Clics : 14486
Au cours de l'écriture de mon projet Apaguard sur l'Arduino, j'ai été confronté au problème d'espace disponible dans la SRAM...
L'arduino UNO ne possède "que" 2048 octets de SRAM, qui peuvent être rapidement remplis si l'on n'y prend pas garde. Je vous livre ici les quelques astuces que j'ai utilisées afin de mieux gérer la SRAM et gagner de précieux octets !
- Détails
- Clics : 35119
To be finished...
Some years ago, i developed my own rotator interface with a PIC 18F452. In a need of another interface, i was unable to find my software sources of this project, lost somewhere in the computer Walhalla ! So, i looked for a finished project to build, and found the K3NG Arduino rotator project.
It looked very complete and having some recent experiences with the Arduino, i decided to give it a try.
What i needed :
- Only azimuth drive
- 2 lines LCD display (as i had several of them)
- Eventualy 2 buttons CW + CCW to drive the rotator
- Running on an Arduino Uno (as i had several)
- Détails
- Clics : 13168
Dans mon projet "Apaguard", j'ai eu besoin de rapatrier un certain nombre de données en temps réel. Un rucher étant généralement éloigné de toute civilisation, la transmission des informations collectées sur place ne peut se faire que par GSM, les abeilles étant rarement abonnées à l'ADSL !
En raison de son prix modique et sa large utilisation, j'ai choisi d'utiliser un shield GSM SIM900.
Voici les quelques constatations faites lors de sa mise en service et son utilisation.
- Détails
- Clics : 25340
La mesure d'une tension à l'aide d'un Arduino UNO utilise une des entrées du convertisseur A/D. A lire les différents exemples, cette utilisation semble simple, mais je me suis vite rendu compte que le problème était plus ardu qu'il n'y paraissait !
Pour finir, j'ai obtenu de très bons résultats en prenant certaines précautions.
- Kazançlı bir başlangıç yapmak için deneme bonusu sunan bu siteye göz atabilirsiniz.
- Fırsatlarla dolu deneme bonusu veren siteler arasında öne çıkan bir seçenek burada.
- Yeni üyeler için özel bonus veren siteler, avantajlı teklifleriyle dikkat çekiyor.
- Kullanıcı memnuniyetine odaklanan bonus veren siteler, eşsiz fırsatlar sunuyor.
- Güvenilir bir deneyim için deneme bonusu veren siteler, kazanç kapınızı aralıyor.
- Hızlı kazanç fırsatı sağlayan deneme bonusu seçeneklerini keşfedin.
- Avantajlı teklifleriyle deneme bonusu veren siteler, yüksek kazanç imkanı sunuyor.