")
")
- Détails
- Affichages : 32618
Cette page n'a aucune autre prétention que d'essayer de vous faire comprendre simplement comment fonctionne l'antenne verticale quart d'onde, d'éviter certaines confusions et vous expliquer comment en tirer le maximum.
 L'antenne la plus simple de toutes les antennes est l'antenne verticale, aussi appelée antenne Marconi, reliée à la terre à sa partie inférieure et d'une longueur électrique d'un quart d'onde.
L'antenne la plus simple de toutes les antennes est l'antenne verticale, aussi appelée antenne Marconi, reliée à la terre à sa partie inférieure et d'une longueur électrique d'un quart d'onde.
Cette antenne vibre avec un noeud d'intensité (minimum) à son sommet, donc un ventre de tension (maximum).
Simple dans son fonctionnement, elle n'est par contre pas la plus simple à comprendre et à appréhender.
Ci contre : L'antenne 1/2 onde et son équivalent 1/4 onde montée au sol. Le 1/4 d'onde manquant peut être considéré comme l'image dans le sol.
- Détails
- Affichages : 10705
Au cours de l'écriture de mon projet Apaguard sur l'Arduino, j'ai été confronté au problème d'espace disponible dans la SRAM...
L'arduino UNO ne possède "que" 2048 octets de SRAM, qui peuvent être rapidement remplis si l'on n'y prend pas garde. Je vous livre ici les quelques astuces que j'ai utilisées afin de mieux gérer la SRAM et gagner de précieux octets !
- Détails
- Affichages : 9560
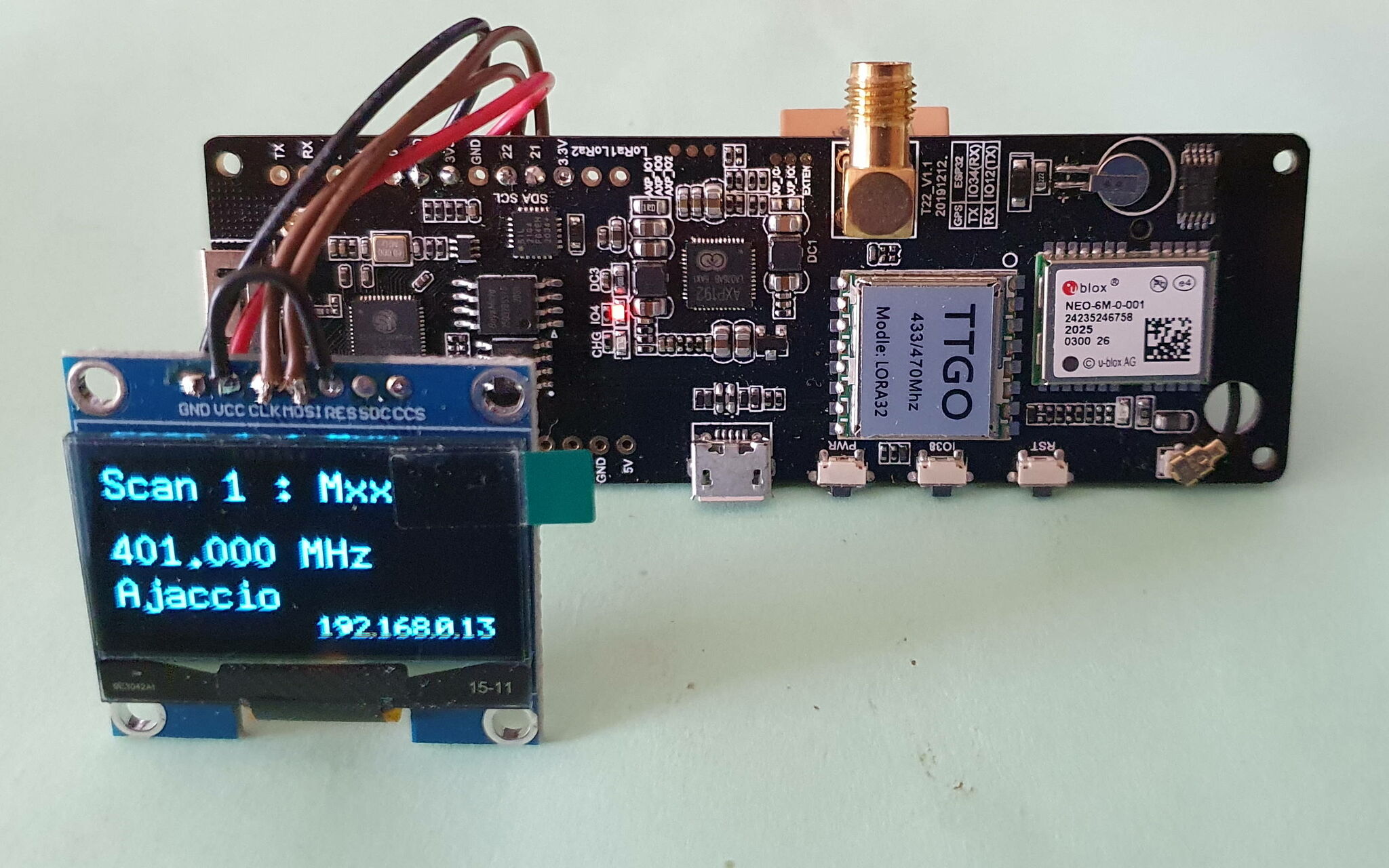 |
Le but de cet article est de donner quelques informations concernant la réalisation d'une installation portable pour la recherche des radiosondes à l'aide d'un module TTGO et du logiciel de DL9RDZ, rdz_ttgo_sonde. L'ensemble permet de suivre un ballon sonde de manière portable et autonome et de retrouver la sonde une fois tombée au sol. Le logiciel de DL9RDZ communique avec un navigateur Web pour l'affichage des positions de la sonde et du récepteur. Lire aussi l'article Utilisation du récepteur radiosondes RDZ_TTGO |
- Détails
- Affichages : 1048
 Quelques informations sur le SRM9000 utilisé sur le relais VHF d'Ajaccio TK5ZCF.
Quelques informations sur le SRM9000 utilisé sur le relais VHF d'Ajaccio TK5ZCF.
Logiciels:
Récupérables sur le site donné en lien.
Le logiciel FPPv586 permet de programmer le SRM9000 et de mettre à jour le logiciel en version 6.56 du 05/11/2020
Le mot de passe du menu LEVEL3 est "SIMOCO".
Le logiciel "Alignment tool v 2.77" permet d'aligner le poste (puissances, squelch, RSSI, TCXO, VCO, etc...)
Mot de passe ocomis
Interface de programmation :
La programmation se fait par la prise RJ45 du boîtier de commande ou du poste sans le boîtier de commande. Il nécessite une interface de programmation classique avec niveaux TTL.
ATTENTION, le câblage donné est inversé par rapport à la numérotation informatique !
Si on utilise un câble réseau standard, il faut donc utiliser les couleurs :
Orange = Masse
Marron = TxD
Marron/Blanc = RxD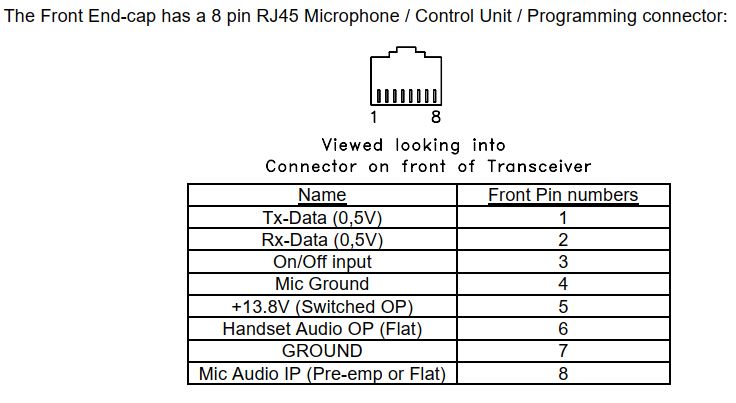
Modification du SRM9000 rev9
Il s'agit d'utiliser la sortie BF disponible pour les cartes optionnelles qui n'est, contrairement à ce qui est indiqué dans les docs trouvées, pas "FLAT".
Au contraire, elle est nettement mieux filtrée et squelchée que celle présente sur le connecteur d'extension DB15.
Celle sur la pin DB15-15 est non squelchée et non désaccentuée, donc utilisable pour un traitement DSP externe, au décodage TCS externe ou pour des transmissions numériques.
Pour rendre la BF du connecteur I/O 26 broches disponible sur la prise DB15 :
- dessouder la résistance de la pin DB15-3 vers la ligne "Ignition". (vois photo)
- souder un fil entre la pin 23 du mini-connecteur I/O vers la pin 3 de la DB15-3 (voir photos)![]() Attention à ne pas faire passer le fil sur la platine. Il serait écrasé lors de la remise en place du blindage ! Contourner le circuit imprimé.
Attention à ne pas faire passer le fil sur la platine. Il serait écrasé lors de la remise en place du blindage ! Contourner le circuit imprimé.


Voici les différents spectres obtenus sur les 2 sorties :






Connexion :
La prise RJ45 ne comporte pas de ligne PTT, il faut donc utiliser le connecteur DB15 si on veut n'utiliser qu'un seul cordon.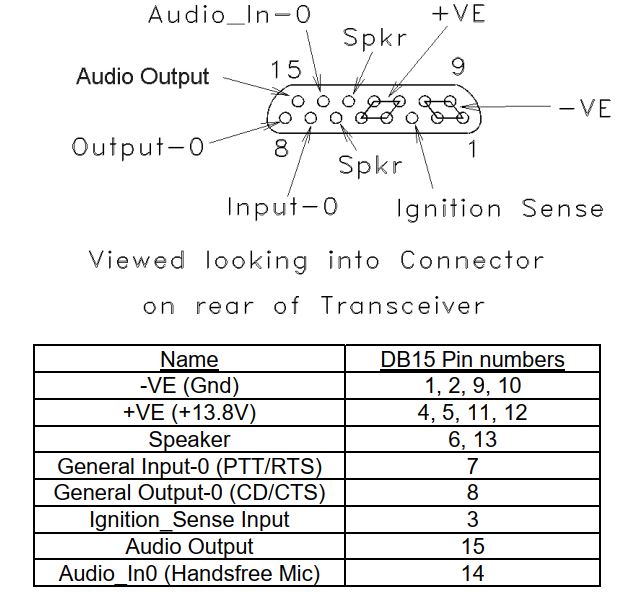
Si on souhaite utiliser les SRM9000 en conjonction avec ASL en mode "FLAT", utiliser la pin DB15-15. En mode "SPEAKER" la pin DB15-3 ou bien la DB15-15 en utilisant le DSP d'ASL pour filtrer la BF.
Le cordon Interface TKNet <> SRM9000 :
| DB9 | RX audio | DB15 TX | DB15 RX |
| 1 | TX audio | 15 ou 3 | |
| 2 | 14 | ||
| 3 | GND | 1 | 1 |
| 4 | SQUELCH | 8 | |
| 5 | PTT | 7 | |
| 6 | |||
| 7 | |||
| 8 | |||
| 9 | TCS |
Configuration FPP
![]() ATTENTION :
ATTENTION :
Contrairement à ce qui est écrit dans la documentation, la coche "Telemetry output" ne coupe pas seulement l'ampli BF !!
"Telemetry output" valide la BF sur la sortie IO pin 23 et supprime aussi le décodage TCS sur DB15-8 !!
L'entrée BF TX (niveau microphone) ne demande pas plus de 40 mV pour une excursion maximale. On peut réduire la sensibilité de cette entrée à l'aide du menu caché "Audio levels"
Il faut valider le niveau 3 dans les options.(Accès par mot de passe "SIMOCO")
Réduire "External input" à -12 dB ou -18 dB selon besoins.
Si on souhaite avoir de la BF disponible sur la pin 23 du connecteur d'extension interne I/O 26 points :
Dans le choix "Input/Output/Option board", choisir "Discriminator".
Pour un signal NON squelché, mettre le niveau "Audio/Default mute" à 0, sinon 4 par défaut.
Le niveau du signal est réglé par "Audio/Data volume", ici 25.
L'entrée BF TX peut être soit préaccentuée ou pas :
Avec pré-accentuation : "Input/Output - Input DB14-7" : PTT Ext
Sans pré-accentuation : "Input/Output - Input DB14-7" : PTT Ext Data
L'entrée PTT peut être anti-rebond : "Dbnce" : 20 ms (à tester suivant votre signal PTT)
Pour la détection du signal reçu, on peut choisir entre squelch ou décodage TCS :
TCS : Output DB-8 : Valid signal / High ou low (suivant l'interface utilisée)
Squelch : Output DB-8 : Carrier Detect / High ou low (suivant l'interface utilisée)
On peut (doit) programmer un timeout sur le TX afin qu'il ne reste pas indéfiniment en émissions en cas de problème (panne, porteuse permanente, etc...)
"Microphone/Txlimit timer" : 240 pour 4 minutes
![]() Sur certains SRM9000, le niveau de sortie sur la DB15-15 est fixe, sur d'autres il dépend du niveau réglé dans l'onglet "Audio/Minimum speech"
Sur certains SRM9000, le niveau de sortie sur la DB15-15 est fixe, sur d'autres il dépend du niveau réglé dans l'onglet "Audio/Minimum speech"
Fichier JOB pour le relais TK5ZCF.
Liens :
RADARC, logiciels, docs.
SRM9000 configuration ASL
- Détails
- Affichages : 56811
 Pendant nos contests multi-multi, nous avons été confrontés à un problème de réception sur le stations bandes basses.
Pendant nos contests multi-multi, nous avons été confrontés à un problème de réception sur le stations bandes basses.
Nous avions trois positions de trafic, une 160m, une sur 80m et enfin une sur 40m.
Le problème était simple : comment pouvions partager les antennes de réception entre ces 3 stations ?
La première solution a été "d'éclater" chaque antenne dans trois directions vers les 3 récepteurs à l'aide de T coaxiaux, puis de sélectionner une antenne parmi les autres avec des commutateurs coaxiaux.
Outre que ce système nécessitait de nombreux accessoires, il ne donnait pas satisfaction. Lorsque la même antenne était sélectionnée par 2 stations, il y avait rupture d'impédance et affaiblissement important...
- Détails
- Affichages : 24330
To be finished...
Some years ago, i developed my own rotator interface with a PIC 18F452. In a need of another interface, i was unable to find my software sources of this project, lost somewhere in the computer Walhalla ! So, i looked for a finished project to build, and found the K3NG Arduino rotator project.
It looked very complete and having some recent experiences with the Arduino, i decided to give it a try.
What i needed :
- Only azimuth drive
- 2 lines LCD display (as i had several of them)
- Eventualy 2 buttons CW + CCW to drive the rotator
- Running on an Arduino Uno (as i had several)
- Détails
- Affichages : 4661
| |
Cet article est essentiellement un mémo personnel, mais peut être utile à d'autres. AllStarLink est un réseau de répéteurs radioamateurs, de stations de base distantes et de HotSpots accessibles les uns aux autres via le protocole de voix sur Internet. C'est le logiciel que nous utilisons sur notre réseau privé TKNet et installé sur des Raspberry Pi..
|
- Détails
- Affichages : 37718
 Pour mes activités portable en VHF, j'utilisais depuis pas loin de 30 ans une Yagi 9 el de F9FT. Celle-ci était légère, peu encombrante et relativement performante. Malheureusement elle a fini par rendre l'âme à la suite d'une chute lors d'un contest VHF.
Pour mes activités portable en VHF, j'utilisais depuis pas loin de 30 ans une Yagi 9 el de F9FT. Celle-ci était légère, peu encombrante et relativement performante. Malheureusement elle a fini par rendre l'âme à la suite d'une chute lors d'un contest VHF.
Pour sa remplaçante, je décidais de construire quelque chose. Après quelques recherches, j'éliminais certains designs car ils ne répondaient pas à tous les critères que je m'étais fixés. Mon choix s'est finalement porté sur une antenne selon DK7ZB, une Yagi 7 éléments en technologie 28 Ohms. Les avantages des antennes étudiées par DK7ZB sont :
- optimisation par ordinateur
- reproductibilité assurée
- facilement démontable et transportable pour les activités portable et contest
- excellentes caractéristiques électriques, gain, diagramme de rayonnement et adaptation.
La version originale décrite sur le site de Martin DK7ZB avait un boom de 3.26 m, je lui ai demandé de la recalculer afin de la faire tenir sur un boom de 3m. Les tubes et profilés d'aluminium étant vendus en longueur de 6m, cette solution permet de construire 2 antennes sans perte de matière première, au prix il est vrai d'une légère perte de gain. (moins de 0,4 dB)
Une longueur de 6m de tube permet également de réaliser tous les éléments pour ces 2 antennes. Passer à 8 éléments aurait nécessité l'achat d'une deuxième longueur de 6m !
- Détails
- Affichages : 9685
Dans mon projet "Apaguard", j'ai eu besoin de rapatrier un certain nombre de données en temps réel. Un rucher étant généralement éloigné de toute civilisation, la transmission des informations collectées sur place ne peut se faire que par GSM, les abeilles étant rarement abonnées à l'ADSL !
En raison de son prix modique et sa large utilisation, j'ai choisi d'utiliser un shield GSM SIM900.
Voici les quelques constatations faites lors de sa mise en service et son utilisation.
- Détails
- Affichages : 330
Régulateur de charge solaire Aliexpress
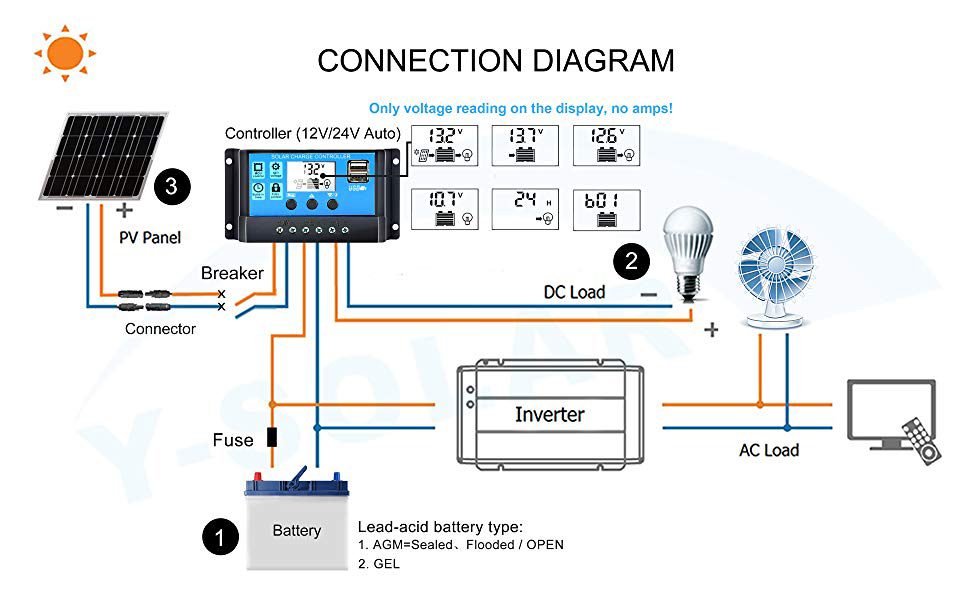
Branchement:
Ce régulateur doit être branché et débranché dans un ordre précis:
1 - Connecter la batterie
2 - Connecter les panneaux solaires
3 - Connecter la charge
Procéder à l'INVERSE pour débrancher l'installation !
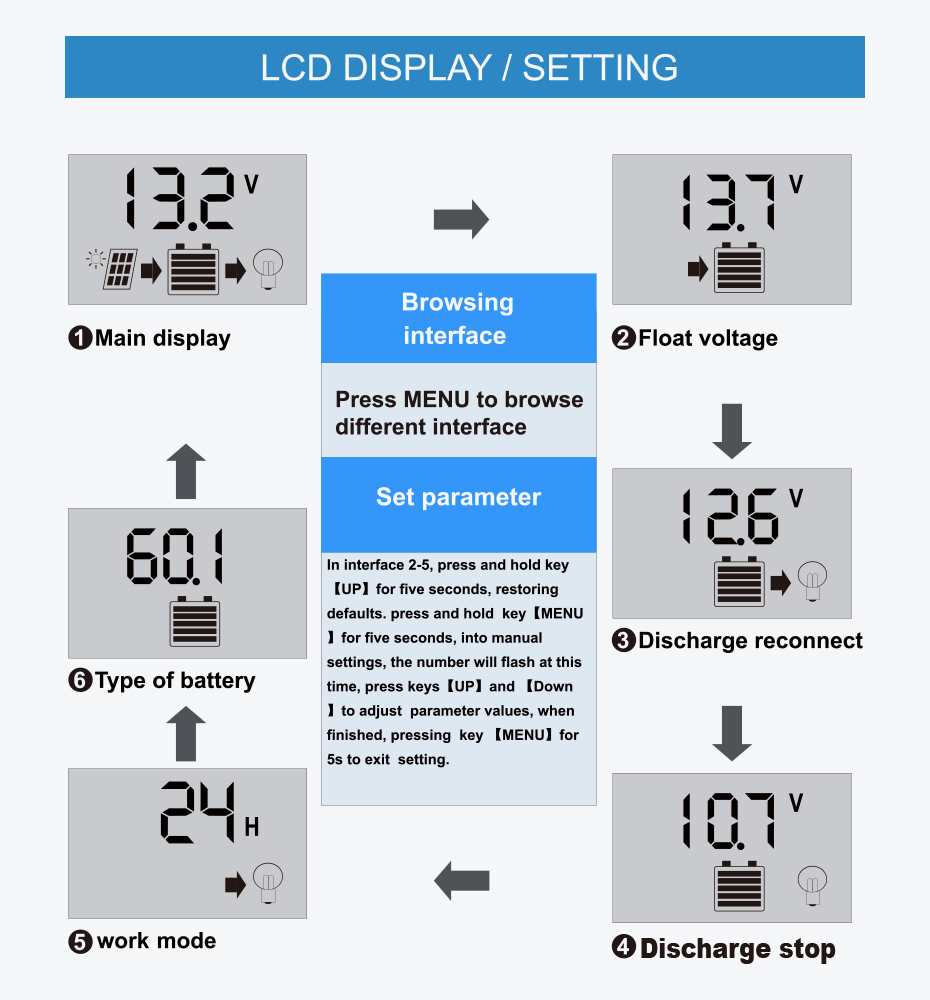
Réglages:
Un appui prolongé de la touche MENU permet de passer d'un affichage à l'autre de façon cyclique.
Un appui long permet d'entrer dans la modification du paramètre affiché, l'afficheur clignote alors.
On modifie la valeur à l'aide des touches + et -. Un appui prolongé sur la touche MENU ou une attente de quelques secondes valide le changement.
Le cycle d'affichage est :
1 - Affichage normal
2 - Tension de floating (réglable, par défaut 13,7 V)
3 - Tension de reconnexion de la charge suite à une décharge (réglable, par défaut 12,6 V)
4 - Tension de déconnexion de la charge pour éviter une décharge profonde (réglable, par défaut 10,7 V)
5 - Type de fonctionnement : 24H (charge branchée en permanence), OH (du lever au coucher), 1-23H (du coucher et pendant le nb d'heures programmées)
6 - Type de batterie : b01 (scellée), b02 (gel), b03 (ouverte) joue sur la tension d'égalisation
Utilisation:
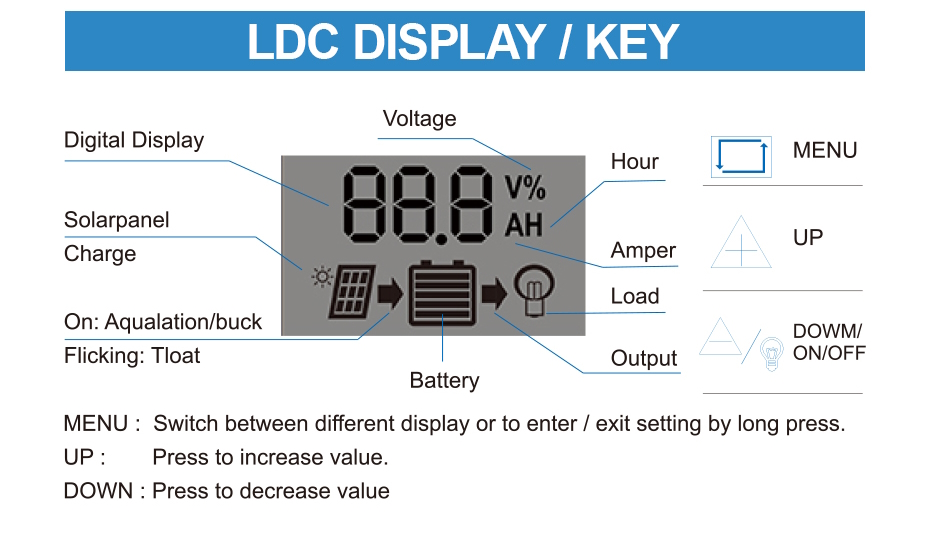
Le bouton - (moins) permet de connecter, déconnecter la charge.
Le clignotement de la flèche entre le panneau et la batterie, indique le mode floating.
La flèche fixe indique le mode charge égalisation.
- Détails
- Affichages : 97659
 Voici la description sommaire d'un système d'alimentation et de commutation permettant de mettre en phase quatre antennes verticales 40m, 80m ou 160m. Les principes décrits ici sont bien sûr applicables à toutes les autres bandes, mais l'intérêt est alors moins évident, une antenne directive donnera des meilleurs résultats pour un investissement identique.
Voici la description sommaire d'un système d'alimentation et de commutation permettant de mettre en phase quatre antennes verticales 40m, 80m ou 160m. Les principes décrits ici sont bien sûr applicables à toutes les autres bandes, mais l'intérêt est alors moins évident, une antenne directive donnera des meilleurs résultats pour un investissement identique.
Le système de déphasage est articulé autour d'un déphaseur hybride COLLINS. Ce système de mise en phase est loin d'être le meilleur, mais il a le mérite d'être de construction et une mise en œuvre faciles, notamment pour les contests, les field-days et les expéditions.
De nombreuses stations utilisent ce système avec succès qui a fait ses preuves.
Photo d'un système de 4 antennes pour la bande des 80m. (Cliquez sur l'image pour agrandir)